PIC AVR 工作室->TopPage->PICの工作->ポータブル赤道儀(前編)
PICでポータブル赤道儀(前編)
はじめに…
カメラを三脚に固定して星を長時間撮影した写真をご覧になったことはありますか?ご存知の通り固定撮影では星は曲線の弧を描きます。 これは地球の自転によって、星が見かけ上東から昇って西に沈む動きをしているからです↓こんな風に。小学生の理科で習ったアレです。 「日周運動」ですね。

赤道儀というのは、望遠鏡やカメラで星を見たり撮ったりするときに使うモノで、星の動きを追尾してくれる機械です。 仕組み的には、地球の自転を打ち消すように逆回転する機械です。これに望遠鏡などを載せると高精度に星を追尾してくれるので、 光量の少ない星雲・星団でも長時間露光させて撮影することができるので、淡い天体の撮影時には必須のアイテムです。
先ほどの写真とほぼ条件で赤道儀を使って撮影した写真です。さそり座と天の川が写っているのが見て取れます。

なお、天体観測と赤道儀のお話については別ページに纏めるので、 まずは一度そちらをご一覧ください。以下ではどんな風に赤道儀を作っていくかのお話をします。
製作の背景
そういうわけで赤道儀の原理自体は比較的シンプルなんですが、一般に赤道儀は高い追尾精度と望遠鏡の重量にも耐える強固な剛性を実現するために、 大きくて重いというのが相場です。
カメラ好きな私としては、カメラや三脚をカメラバッグで持ち歩くことが出来るこの現代で、 なぜ赤道儀だけは持ち歩けるサイズに成らないのか不便に感じていました。
東京近郊に住んでいると、時々旅行に行った時に眺める光害のない奇麗な夜空。撮りたい…。是非旅行のお供として簡単に持ち歩ける赤道儀が欲しい… カメラバッグにポンって放り込んで持ち歩ける赤道儀が欲しい…
普通の一眼レフと軽量カーボン三脚は既に手元に。あとは小型軽量の赤道儀さえあれば…
21世紀が始まってかれこれ10年近くなりますが、赤道儀は未だに小型軽量化が実現されてません。 私が20世紀最後の年にふと思いついたアイデア。同時期にPICというマイコンのことを知り、 その時から独学でPICマイコンの勉強と小型軽量の赤道儀設計に着手。 以来、少しずつバージョンアップしながらなんとか実用的な精度、軽さ、小ささまで進歩させてきました。 っていうか、元々は赤道儀作るのがマイコンを始めたキッカケだったんですね…
コンセプト
普段マイコンを扱っている人たちならホームセンターでちょっとした材料を買い込んで来るだけで作れるようなお手軽さ。 そして3~4000円程度で組み上げられる安い材料費。それでいて星野撮影(※1)程度なら充分な追尾制度を誇る赤道儀を自作してしまおうって作戦です。 いや、むしろちょっとした星雲・星団程度なら望遠レンズ使ってもそこそこの精度で撮影可能な精度が実現できます。ホント。
安い、軽い、そこそこの精度! それがこのPICで作るポータブル赤道儀!(※2)
(※1):星野撮影…広角レンズなどで、人間が肉眼で見るような…星座全体のような比較的広角度で撮影する写し方のこと。 望遠レンズや天体望遠鏡で1個の星団や惑星などを撮ることと対照的な撮影方法です。
(※2):ポータブル赤道儀…一般にはよく「ポタ赤」と呼ばれます。

さっきのさそり座と天の川を撮ったのがこの自作赤道儀。試作段階の赤道儀(3号機)です。三脚とカメラの間にある白い物体。
基板剥き出し、歯車剥き出し、モーター剥き出しと見た目はイマイチだけど、一応軽くて小さくて安くて、 それでいて必要十分といえる程度の精度が出るので、一応実用品といえる代物です。
もうちょっと奇麗に仕上がるといいんですけどねぇ… まぁ、3~4000円の材料費じゃぁこんなモンでしょう。 最終的にはこれよりも小型化を進めて、カメラバッグに「ポンッ」って入れて持ち歩けるようにしたいという構想。
一般的な赤道儀
まずは赤道儀の機能を実現するための仕組みをタイプ別に紐解いていって、必要となるコンポーネントの要件を抽出し、 自作するならどんなカタチにしていったらいいかを考えていきます。
一般的な赤道儀の仕組み
一般的な赤道儀はこんな風になっています。
これは、三脚の上に赤道儀本体(薄緑のところとクリーム色のところ)が載っていて、そこに自由雲台とカメラを取り付けてある図です。 普通はカメラではなく天体望遠鏡を取り付けて使うほうが一般的でしょうかね…
薄緑色のところは三脚にネジ止めしてあって、クリーム色の部分は薄緑を中心軸として回転するようになってます。 薄緑には極軸望遠鏡が内蔵されていて、左下から覗き込んだ時に北極星が見えるようになってて、 地球の地軸と赤道儀の回転軸が並行となるように調整可能になっています。
これを左下から右上方向に見上げてみた図がこれ。
ギヤがかなり大げさに描いてありますが…。まず右にあるステッピングモーターが回転します。その回転を中央の変速ギヤで減速して、 左側のギヤが「1恒星日あたり丁度1回転」するように設定されています。
左のギヤが1回転するとこのギヤに直結したクリーム色の部分も1回転するので、星を正確に追尾することができるというわけです。 こんな風に動作原理自体は単純です。モーターの制御方法も単純に「等速」であれば良いわけ。 ステッピングモーターを等速で回すのは造作無い話ですからね。コンピューターが負うべき処理方法も超簡単に済ますことができます。
ちなみにこういう平歯車の組合せだけではなく、ウォームギヤを用いている場合もあります。
下にある橙色っぽい芋虫が「ウォーム」。これが1回転すると上のギヤ(ウォームホイール)が歯1枚分回転することになり、 ここだけでもかなりの減速比を得ることができます。さっきの図と比べるとモーターやギヤの配置が90°ほど回転してますが、 動作原理自体は平歯車と全く同じ。(それにしてもウォームじゃなくてワームだよね…)
動作原理も制御も簡単ならこれの様式で自作するのは簡単じゃん!と考えたくなるのですが、色々現実の壁にぶち当たることになります。
一般的な赤道儀を自作する際の諸問題
(1)適当なギヤが手に入り難い
一般に市販されている赤道儀では、上記のクリーム色部分に固着されているギヤ(図で一番直径が大きいギヤ=赤経ギヤ… 便宜上メインギヤと呼ぶことにします) には144枚歯の物が使われているようです。144枚歯というのは、約10分間で歯1枚が通過する程度の歯数です。
それなりにチカラが加わるギヤなのでそのトルクに耐えられる直径が必要になるであろう事が一つの理由だと思われますが、 一番大きな理由は下記(3)のピリオディックモーションに因るところが大きいと思われます。
144枚歯というのは多分ある程度の妥協の産物で、精度をあげるためなら144枚歯よりも多くしたいけど、 コンパクトさや部品の単価などを考慮すると144枚歯よりも少なくしたい…その辺が本当のココロだろうと思います。
ちなみにビクセンだとGPシリーズ(GP2、GPD2)では144枚歯ですが、 上位機種スフィンクスシリーズ(SX、SXD)ではメインギヤに180枚歯を採用しています。
さて、このメインギヤ。自作するならどのくらいの歯数を選べばよいか…ここが精度の要になるので、 出来ればたくさんの歯数の歯車で、かつできれば真鍮製など金属を使いたいところ。
千石だと…0.75mmピッチの真鍮製95枚歯でも1800~2000円程度。これより大きいのは置いてないみたい。 テクノロジアだと…協育歯車のポリアセタール製100枚歯で300円ちょっと。真鍮製だと90枚歯で800円ちょっと。(nekosan調べ)
もう少し多い歯数の歯車が欲しいところだけど、歯車の数についてはひとまず目をつぶるとしてまずはこの線で考えてみると…
(2)高精度な回転軸(極軸)を作るのが大変
(1)のような市販の歯車を使うとして、赤道儀に仕上げるためにはにはこのギヤを動かすためのモーターや変速ギヤ、 制御基板を取り付ける必要があるのが1点。そして、ギヤ側に同調する構造物にも自由雲台や望遠鏡を取り付けるマウントが必要になるのがもう一点。
一番の問題はそのあたり。ギヤだけ手に入っても何も出来ないわけ。全体の構造を考えないとね…。
ギヤが360°グルグル周っても構造物同士がぶつからず、そこそこ強度があって、自前の工具でも工作ができて、 実用的な大きさ・形状っていうとなかなか難しい…。 回転軸をどういう形状にするのか、どうやってギヤをドライブするのか、どこに自由雲台をマウントして、どこに三脚を取り付けるのか…
そんな問題を一つ一つ片付けていかなければなりません。
(3)ピリオディックモーションが生じる
ギヤを回転させるときには、お互いのギヤの歯が噛み合って1枚1枚進んでいくことになります。その時、歯の山と谷では微妙に速度が変わります。
いや、原理上はインボリュート歯車を用いていれば等速回転が伝達されているはずなんですが、 現実的には歯車の加工精度とかによって歯の山と谷で微妙に速度に変化が生じます。グラフにしてみるとこんなイメージ。
横軸が時間、縦軸が回転角だと思ってください。理想的には経過時間と回転角が比例関係(完全に直線状)になるんですが、 実際は歯車1枚を通過する毎に速くなったり遅くなったりしちゃう。図の矢印の範囲が「歯1枚分」に相当すると考えてください。 (実際にこんなに緩やかな曲線になるかは別として…)
歯車で駆動する現実の赤道儀では図のように歯車の歯1枚通過するごとに誤差が生じることとなり、つまり周期的に誤差が生じることになります。 英語で言えばピリオディック(periodic)モーション(motion)、もしくはピリオディックエラーと呼ばれます。
ピリオディックモーションの影響はゼロには出来ませんが、小さくすることは可能です。
小さくするためには、歯車の加工精度を高くするのが第1ですが、自作レベルだけでなく市販の高精度歯車でも難しいので、別の方法を考えます。 それは何かというと…一般には歯車の歯数を増やすことです。
歯車の端数を増やすと、ピリオディックモーションが生じる周期が短くなると同時にその誤差の絶対値を小さくすることができます。 そのため、歯車の歯数を増やすことによってピリオディックモーションを減らすことが可能になります。 例えば同じビクセンでもGPシリーズは144枚なのに対して、スフィンクスシリーズが180枚歯を採用しているのはそのせいかと思われます。
というわけで、歯車の歯数を増やせば誤差を小さくすることができるんですが、(1)との絡みで限界があります。
(4)一般的な赤道儀タイプのまとめ
一般的な赤道儀は、仕組みや制御方法は簡単なんですが、実際に作ろうとすると結構難しい…と言うことになりそうです。
タンジェントスクリュー式の赤道儀
形状
タンジェントスクリュー式の赤道儀はこんな形になっています。一般的な赤道儀とは随分形態が異なりますね… 大きな歯車(メインギヤ)が見当たりません。
下の棒の部分を三脚に固定し、上の棒に自由雲台やカメラを取り付けた状態で使用します。
モーターがギヤを回すとネジが上に押し上げられます。するとネジが上側の棒を押し上げて、 左の蝶番(ヒンジ)を中心に上の棒が回転するカタチとなっています。ヒンジ式などとも呼ばれます。
動作原理
なぜこんな方法で星が追尾できるのか?その動作原理の部分だけを抽出した図にしてみます。
ネジが押し上げる高さをH、押し上げられた角度をθ、そして下棒の長さをLと置くと、これらは一つの方程式で表すことができるようになります。
H = L × tan θ
つまり、半径Lの円における角度θの「正接(タンジェント)」がHということになります。
この時、Lを「ある長さ」に設定すると、角度の計算がとてもラクチンになるためよく使われる長さがあります。それは…228.56mmです。
押しネジのピッチ1山分の幅を、それだけ進むのに要する角度ラジアン値(つまり押しネジ1回転の時間で地球が自転する角度ラジアン) のタンジェントで割った値を用いれば、角度0ラジアン付近ではネジの進む長さと角度(ラジアン)が一致することになります。
例えば、押しネジにM6ネジ(=ネジピッチが1mm幅)を用いた時に1分(=60秒)あたり1回転でネジを押し進める場合なら、Lの長さは
L = 1mm ÷ tan(2π ÷ (86164秒÷60秒)) ≒ 228.56mm
を適用すると、M6ネジ(1mmピッチ)を1分間あたり1回転すれば正確に恒星時で星を追尾することが可能になります。 これはラジアンで表した角度θと、そのタンジェント値tanθが0ラジアン付近で等しくなることを利用した方法です。
図の「中カッコ」の付近ですね。この付近ならタンジェントとかを全然意識せず1分間にネジを1回転で回しさえすれば、 上側の棒が(ほぼ)正確に星を追尾することが可能になります。
その為、時計を見ながら1分間にネジを”手動で”1回転させることによって星を追尾するという赤道儀も世の中にはたくさん存在します。 アイベルの オリジナル製品に HG-1という手動赤道儀があって、 これがまさに上記の方式を使っています。 (実は最初に買った赤道儀はこのHG-1でした)
といっても、タンジェントの値は角度が0ラジアンから離れていくにつれてラジアン値との誤差が徐々に大きくなり、 π/2(=90度)では無限大になってしまいます。そのため、このままではきわめて短い時間しか正確に追尾することが出来ません。
一旦整理。
Lの長さを228.56mm、Hの長さをθとした場合、0ラジアン付近では「ネジで押し出したHの長さ=θ」と「理想上のHの長さ=tanθ」 がほぼ等しい(比例関係)ためほぼ正確に追尾可能。 だけど離れるにつれてタンジェントの値は上に逸れていくので誤差が徐々に大きくなっていく…。ここがタンジェントスクリュー方式のミソ。
これを念頭に置きながら、ネジを押し上げる速度(もしくは長さ) をマイコンの三角関数ライブラリとかを用いて適当にコントロールすれば角度を「正確に制御」できるということが解ってきます。 私が一番最初に作った赤道儀の試作品は、まさにこのタンジェントスクリュー方式+マイコンという構成の赤道儀です。
最初の試作品…タンジェントスクリューの応用品
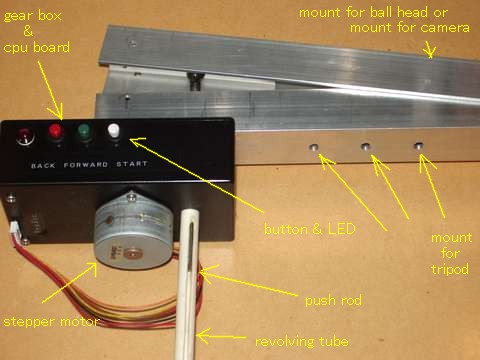
私が一番最初に作った「マイコン制御の赤道儀」を晒して見ます。ご覧の通りオーソドックスなタンジェントスクリュー方式です。
もっと言うと、これは私がマイコン使って一番最初に作った記念すべき「完成品1号」…ということになるでしょうか。 (それまでは秋月の16F84ボードや16F877ボードとかでLCDやRTCを繋いで遊んだり、他の人の作ったモノを真似てみたりばかりだったので)
メインパーツとしては、2本向かい合わせになっている「コの字」型のアルミ押し出し材。 それぞれのコの字型の空いている側を向かい合わせるという使い方によって回転軸(=極軸)が動作中に歪まないような工夫をしています。 写真の右端外に切れちゃって写ってませんが、2つの穴で支えているということが強度と精度のポイント。
ちなみに、写真に写っているのは2号機。1号機はというと…モーターの出力(トルク、パワー)が足りなくて上手く駆動することが出来ず、 ギヤボックスやモーター一式をオジャンに。アルミの構造物とCPU基板は1号機のモノをそのまま流用し、 ギヤボックス周りだけ一新したものがこの2号機。
試作品の解説
簡単な解説を。
銀色のアルミのところが先ほどの図でいう「上の棒」と「下の棒」に相当。蝶番の変わりにアルミ押し出し材に穴を空けておいて、 そこに軸棒を通して回転軸としています。この2本のアルミ押し出し材の反対側がネジで押し広げられていくことで星を追尾することができるわけ。 巨大な蝶番と同じ仕組みな訳です。下の棒には三脚を、上の棒には自由雲台やカメラをそれぞれ取り付けて使います。
黒い箱はCPU基板の格納兼ギヤボックスになっています。操作ボタンやLEDもここに登載。丸い銀色はステッピングモーター。
ステッピングモーターが回転すると、ギヤボックスで減速しながら白い棒状のもの(押し出し棒)を回転させることになるんですが… この白い棒状の「押し出し棒」付近がタンジェントスクリュータイプの赤道儀の「一番の肝」となります。そのあたりを拡大してみたのがこれ。
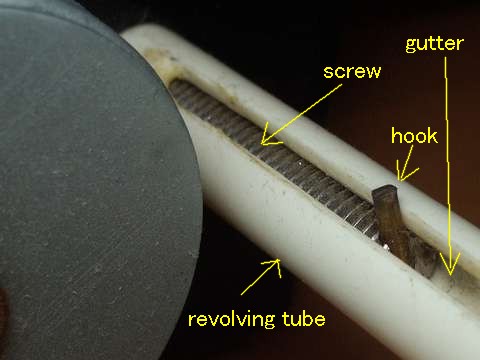
白い棒状のモノは実は中空のチューブで、溝が1本切ってあります。内部にはこのようにネジを通してあり、 そのネジの末端には真鍮製のフックを取り付けてあります。
モーターによって白いチューブが回転すると、溝がフックを押し回す形になって、結果ネジも同じ速度で回転することになります。 それによってネジが「上の棒(アルミ押し出し材)」を押し上げることになるわけ。ネジがズレていってもフックが溝を滑りながら移動することができます。
メンドウな方法なんだけど、こうしないと上手く動かないんですね…。
ネジに直接歯車を固定してしまうと回転するにしたがって歯車自体がズレて行ってしまうので、あっという間に歯車が噛みあわなくなっちゃう。 まぁ、ズレていっても支障無いように歯車の「厚み」が数センチ~数十センチとかいう「異常に分厚い(長い?)歯車」が存在すれば別だけど…。
使用マイコンについて
CPU基板ですが、モロモロ考慮した結果マイコンにはPIC16F873を採用しました。 今なら比較的安くて低~中機能程度に分類されてしまうかもしれませんが、作った当時は16F873って結構高くて高性能なマイコンに属してました。 時代の移り変わりです…。
でもまぁ、300milの細身でいながら、そこそこの容量かつたくさんのI/Oピン。 そしてハードウェアUSARTなど充実したペリフェラルということで、当時はサイコーにお気に入りでした。ちょっと処理速度が遅いんだけど… まだ10個くらい買い置きがあるんだよな…(TへT)
この16F873。CCS-Cの数値演算ライブラリが辛うじて入るので、 さっきのグラフに出てきたようなθとtanθのエラーが生じないように、 三角関数ライブラリを使ってモーターの回転速度(ステッピング値)を上手い具合に制御して、 ネジの進む距離が丁度tan関数に沿うようなプログラムにしてあります。1時間とか2時間くらいであればまさに正確に追尾が可能となっています。
その「丁度tan関数に沿う」為の工夫とか、実用上の利便性とか色々と悩みながらなんとかプログラムに落とし込んでいったんですが、 そのあたりの苦労も含めて、作ってみて解った「タンジェントスクリュー方式のモロモロの難点」などを洗い出していきたいと思います。
あ、ちなみにこの赤道儀でも広角レンズで数分程度なら充分奇麗に写りますよ。実際。
タンジェントスクリュー式の実際
というわけで、実際にタンジェントスクリュー式の赤道儀で撮影をしてみた写真を眺めてみます。
タンジェントスクリュー式の試写結果
タンジェントスクリュー式の赤道儀でも、広角レンズ程度かつある程度コンディションが良ければ「精度的には」まぁまぁ実用になることはなります。
これらの写真は「判り易さ」っていう意味で選んだ写真なので、天体写真としての見た目は光害だらけでダメダメな写真ですが… あくまで撮影例としてご覧ください。
画面中心の星は東の空に昇る木星。18mmレンズ(銀塩換算約28mm画角)で4分間の露光です。

これをCCDの1画素単位に等倍で拡大したのがこれ。

周囲の星と併せて見ていただくとお判りかと思いますが、4分間でもちゃんと星々が点になって写ってます。 マイコンでタンジェントの計算を行っているので、単純に1分1回転という方式と違い、 時間の経過に合わせてキチンと角度が制御できているということの現れです。
ちなみにこっちは画面中央地上付近の様子を同様に等倍で切り出したもの。

地上のモノは動かないので、追尾の結果このように流れて写ります。理想的にはそれぞれ濃淡の無い奇麗な1本の線で写るはずなんだけど… 濃淡が出ちゃってます。 4分間の露出で「押しネジ」がおよそ4回転してるので、およそ1分毎に追尾速度にムラが生じているためです。(jpegノイズも少しあるみたいだけど)
言い換えれば約1分あたり1回のペースで計4回ほど追尾速度に緩急が生じているということ。すなわち「ピリオディックモーション」による影響です。
タンジェントスクリュー式の評価
一般的な赤道儀(144枚歯などの歯車で駆動する赤道儀)と比較してみます。 タンジェントスクリュー式の赤道儀では「ネジ溝を歯車の歯」と見なすことがます。 すると歯車1枚分を通過するのに必要な時間は桁違いに短くなり、単純に考えればピリオディックモーションは小さくなると予想できるんですが、 現実はこの通りの結果でした…。発生する理由などは後述。
でもまぁ、この程度写るなら星野撮影用の赤道儀としてはまぁ必要最低限のレベルは満たしているとは言えるんですが… なにしろ、どこでも売ってる材料と工具、そしてマイコン1個、ステッピングモーター1個で出来上がる簡単な物…
しかし作った当時この試作品を通して色々な観点から眺めた結果、 このこと以外にもタンジェントスクリュー式の赤道儀には致命的な欠点があることが判りました。
その中でも致命的な欠点はおよそ2つあるかと思います。
タンジェントスクリュー式の2つのアキレス腱
タンジェントスクリュー式には幾つかの欠点がありますが、その中で最も大きい2つを挙げつつ、 その他の細かい欠点も洗い出しておき、改善可能かどうかの検討材料とします。
アキレス腱その1:押しネジの傾斜による誤差
タンジェントスクリュー式の赤道儀は、その動作原理のために「三角形の3つの角のうち1つが直角」になっている必要があります。 具体的には、下側の棒と押しネジが直角というのが大前提です。
一方、タンジェントスクリュー方式はネジで上側の構造物を押し上げていく形状をしているので、 押し上げるにつれてネジと上側の構造物の角度が斜めに接するようになります。 するとカメラなどの重量が斜め方向に捻じれるように掛かり、ネジを横方向に押し出す力が大きくなっていきます。図にするとこんな感じ。
黄色の矢印、青い矢印、赤い矢印の順で眺めてください。
上側の棒が徐々に開いていくと、押しネジが右方向に押し出される力が掛かり、結果ネジが右方向にズレてしまいます。
すると、この図の右上の赤い矢印のような誤差が生じることになります。この誤差は上側の棒が開いていくにつれて徐々に大きくなっていきます。
アキレス腱その2:摩擦の増大による脱調
先ほどの図でいう下側の棒にはネジ溝が切ってあり、このネジ溝を足がかりにしてネジは回転しながら上に伸びていくわけですが、 右方向への力が大きくなっていくにつれ、ネジ溝の右上と左下の2点だけでネジを支えることになり、摩擦が大きくなっていきます。 先ほどの図の下にある2つの赤い矢印がそれです。
やがてこの摩擦が大きくなりすぎるとモーターのトルクがすべて食われてしまい、ステッピングモーターが脱調を起こします。
これら二つのアキレス腱をグラフにしてみたのがこれ。
角度=0の状態が左下。時間の経過につれてステッピングモーターがステップを進めていく(右方向)わけですが、 その際マイコンがネジの長さをタンジェント曲線の長さ(=黒い曲線)になるよう正確に制御しています。 しかし実際はネジが右に少し倒れているために棒が押し上げられる高さはネジの長さより少しだけ短くなり、棒の高さは赤い曲線のようになります。
また、ある程度の角度まで開くとネジ溝とネジの間の摩擦が大きくなりすぎてモーターが脱調を起こしてしまうので、 それ以上の高さには棒を押し上げることができなくなります。
これら2つとも原因はネジを横方向に押し出す力が発生するということなのですが、 ネジの回転で上側の構造体を押し上げるという仕組みを踏襲する以上、避けることが出来ない欠点となります。
少ない脳みそをフルに使ってあれこれと解決方法を考えてみましたが、これら2つはタンジェントスクリュー式を用いる限り避けられなさそうです。
その他の難点
これら2つのアキレス腱のほかにもタンジェントスクリュー式にはいくつか欠点があります。
致命的な欠点では無いかもしれませんが、まぁ多少利便性を下げてしまうものではあると思います。 まぁそれは「安さ」「軽さ」「自作の容易さ」とのトレードオフと考えればたいした話ではなさそうです。
まずは「巻き戻し」と「稼働時間」のこと。
普通の赤道儀なら、歯車をドンドン押していけばグルグルと歯車が回って行きやがて1周して元に戻ります。 つまり構造上、電池が切れるまで何回転でも周りつづけることができます。
一方、タンジェントスクリュー式は押しネジを使って追尾させるという方式のため、無限大にネジが伸びていっても90度未満の角度しか表現できません。 もちろん無限に長いネジを持ち歩くことは出来ないので、現実的には30度程度までが限界でしょう。 30度といえば約2時間で押し広げられる角度です。それが連続稼働時間の制約となります。
まぁ、現実的には1コマ2時間連続して撮影することはないでしょうし、2時間以上かけて何コマも撮影したい場合は一旦巻き戻せば何とかなります。 問題は巻き戻しに掛かる時間のこと。
ネジを押し出す際のステッピングと同じ速度で巻き戻しをした場合、2時間撮影後なら当然巻き戻しに2時間かかります。 それはオバカサン過ぎるので、普通に考えれば高速回転で巻き戻すでしょう。 でもそうすると、通常駆動の時より大きなトルク・パワーが必要になってしまいます。
つまり「巻き戻し」というおまけ機能が要求するスペックの方が通常駆動のスペックより高いということ。 自動で巻き戻すのであれば巻き戻し機能にスペックをあわせる必要があります。つまりモーターや電源をそれに併せて強力なモノに。
巻き戻し専用のモーター載せるとか、手動で巻き戻すとか、幾つか回避方法も考えてみたんですがあまり面白い方法がありません。
あともう一つ。押しネジが棒から直角に生えた状態で使用するため、ちょっと邪魔です。 折りたたんで運び、現地でサクッと組み立てられればいいんですけどね。そっちもあまりいい解決策が…
そして約1分周期のピリオディックモーション。多分これは押しネジの先端部分の精度によるものだと思います。

押しネジの先端に市販の「袋ナット」を取り付けて使ってます。手で加工するよりも滑らかで奇麗だろうと思って…
それでも少し偏芯しているようで、1回転するごとに出っ張りと凹みが周期的に現れるようです。 まぁ、見た目的にも確かに微妙な歪みが見て取れるような…。それがピリオディックモーションの原因になっている気がします。
でもまぁ、これらの小さな欠点は最初から「そういうものだ」と割り切っておけば星野撮影程度ならそれなりに使えなくもありません。 実際使っている人結構いるわけだし。それよりもアキレス腱の2つの件のほうが重要です。 これらを加味して、小型軽量で安価に作れる赤道儀の方式を模索してみました。
新しい赤道儀の仕組みの模索
既存の赤道儀の問題・課題の整理
一旦、既存の赤道儀がどんな問題・課題を抱えているのかを整理してみます。
まずは市販品タイプ(ウォームギヤなどでドライブする赤道儀)について。
①適当なギヤが手に入り難い、②加工が大変、③身近な材料だけではレイアウトに困る、④比較的長周期のピリオディックモーションが生じる
といったあたりでしょうか。次、タンジェントスクリュー式の場合について。
①90度未満しか追尾出来ない、②押しネジに傾きが生じて計算上と実際の角度に誤差が生じる、③摩擦の為に脱調を起こす、⑤邪魔な棒がはみ出る、 ⑥短周期のピリオディックモーションが生じる
といった辺りが挙げられます。
ウォームギヤ式によるピリオディックモーション対策は、歯数を多く設けるとか、加工精度が高いギヤを使うとか、 歯車自体を大きくして誤差を相対的に小さくするといったことが大前提です。 また歯車自体の精度が高くても、各ギヤの回転軸の距離が正確に配置されていなければせっかくのインボリュート歯車のメリットを活かせず、 結果ピリオディックモーションの原因の一つになってしまいます。単に歯車同士がかみ合っていれば良いというわけではありません。 ギヤボックスの加工精度に因るわけですが、素人加工では工具や精度を確保するのが困難です。
一方、タンジェントスクリューでは溝の細かいネジを使って押し上げていくので、歯1枚1枚のピッチが細かい歯車と見なすことも出来ます。 言い換えれば、1回1回のピリオディックモーションの絶対値を小さくするという観点では原理上有利に働くはずです。
またタンジェントスクリューの「構造物の長さ」がウォームギヤ式の「半径」に相当するので、 理屈上ウォームギヤ式はタンジェントスクリュー式の約2倍の大きさを取らなければ同程度の精度が得られないはずです。 タンジェントスクリュー式にとって小型化に有利な条件です。
しかもネジで押し出すという仕組み自体は、歯車と違ってピリオディックモーションとは本来無縁のモノです。 タンジェントスクリュー式で約1分周期のピリオディックモーションが生じていたのは袋ナットの精度によるものでしょうし。
しかし、タンジェントスクリュー式は押しネジが横に押し出す力が発生し、それゆえに誤差や脱調を引き起こすという構造上の致命傷が存在します。
展望
といったことを加味し、ご家庭にある工具で簡単に工作が可能で小さくて高精度という観点で眺めると、 どちらの方式も一長一短といった感じです。
簡単に精度を出すためには「押しネジ」による追尾を利用しつつ、かつ押しネジが「横に逃げない」ための方策が取れれば実用にはなりそうです。
現状の整理が出来たところで後編に続きます。(クリックするとページ移動します)
![]()